




 >轨道交通>正文
>轨道交通>正文
[0001]本发明属于轨道交通技术领域,具体是一种轨道机车用电动升降脚踏。
包括脚踏骨架,其包括两相对且竖直设置的L型支撑板、用于连接两L型支撑板的撑梁组件以及导杆;升降机构,其包括电动推杆和升降运动组件,所述电动推杆的一端与撑梁组件连接,另一端与升降运动组件连接;踏板组件,安装于升降机构上方;以及电气部件,用于控制升降机构的上升和下降运动。本发明所述的升降脚踏,当司乘人员按下控制开关后,电动推杆向前伸出或者回缩,提供推力实现升降运动组件沿导杆向上或向下运动,从而带动踏板组件上升或下降。司乘人员根据实际需求调节好踏板组件位置后,便可松开控制开关,实现踏板组件位置锁定。
[0002]现有轨道机车升降脚踏,大多采用可锁气弹簧的方案,如将脚踏踏板向上调节,先将可锁气弹簧解锁,气弹簧提供弹力驱使脚踏踏板上升;如将脚踏踏板向下调节,先将可锁气弹簧解锁,司乘人员通过腿部持续对脚踏踏板施加向下的踩踏力,足以克服气弹簧弹力后,可驱使脚踏踏板下降。
[0003]但是可锁气弹簧的方案存在气弹簧伸出速度不易控制,脚踏板向下调节时司乘人员需提供较大的踩踏力等问题。
[0004]因此,本发明提供了一种轨道机车用电动升降脚踏,以解决上述背景技术中提出的问题。
[0005]本发明的目的在于提供一种轨道机车用电动升降脚踏,以解决上述背景技术中提出的问题和缺陷的至少一个方面。
[0006]根据本发明的一个方面,提供一种轨道机车用电动升降脚踏,包括:
[0007]脚踏骨架,其包括两相对且竖直设置的L型支撑板、用于连接两L型支撑板的撑梁组件以及导杆;
[0008]升降机构,其包括电动推杆和升降运动组件,所述电动推杆倾斜设置且电动推杆的一端与撑梁组件连接,电动推杆的另一端与升降运动组件连接;
[0009]踏板组件,安装于升降机构上方,用于供司乘人员踩踏;以及
[0010]电气部件,用于控制升降机构的上升和下降运动。
[0011]根据本发明的另一个实例性的实施例,所述撑梁组件包括第一撑梁、第二撑梁、第三撑梁和第四撑梁,所述第一撑梁和第四撑梁分别设置在两个L型支撑板的顶端和末端上,所述第二撑梁设置在两个L型支撑板的拐点处,所述第三撑梁设置在第二撑梁和第四撑梁之间,所述电动推杆的一端设置于第四撑梁上。
[0012]根据本发明的另一个实例性的实施例,所述导杆设置有两个,两个所述导杆对称竖直设置在第二撑梁上且导杆顶部贯穿第二撑梁,所述第二撑梁对称设有两个下摆臂安装座,所述第二撑梁通过下摆臂安装座与升降运动组件铰接。
[0013]根据本发明的另一个实例性的实施例,所述第四撑梁上设有推杆安装座,所述第四撑梁通过推杆安装座与电动推杆的一端铰接。
[0014]根据本发明的另一个实例性的实施例,所述升降运动组件包括轴承组件、连接梁、转轴以及摆臂组件,所述轴承组件设有两组且分别套设在两个导杆上,所述连接梁水平设置且两端分别与两组轴承组件连接,所述转轴水平设置且转轴的中部与电动推杆的伸出端转动连接,所述摆臂组件设置有两组,两组摆臂组件对称竖直设置在转轴的两端,每组摆臂组件的底部与第二撑梁连接,每组摆臂组件顶部与连接梁连接。
[0015]根据本发明的另一个实例性的实施例,所述轴承组件包括轴承单件和轴承支座,所述轴承支座设置在轴承单件的外部,所述轴承支座通过螺栓与连接梁连接。
[0016]根据本发明的另一个实例性的实施例,所述摆臂组件包括可转动连接的上摆臂和下摆臂,所述下摆臂为倒置的三角形结构,所述下摆臂的底角与第二撑梁连接,所述下摆臂靠近升降运动组件的顶角与转轴连接,所述下摆臂远离升降运动组件的顶角与上摆臂连接,所述上摆臂的顶部与连接梁连接。
[0017]根据本发明的另一个实例性的实施例,所述踏板组件包括脚踏踏板和对称布置在脚踏踏板两端的两个连接板,所述连接板与升降运动组件连接。
[0018]根据本发明的另一个实例性的实施例,所述电气部件包括控制开关、指示灯、继电器、接线端子、限位开关以及电连接器,所述控制开关包括上升控制开关和下降控制开关,上升控制开关和下降控制开关分别控制踏板组件的上升运动和下降运动,所述限位开关包括上止点限位开关和下止点限位开关,上止点限位开关和下止点限位开关分别为升降机构的上止点和下止点提供到位信号。
[0019]根据本发明的另一个实例性的实施例,所述电气部件还包括电源转换器。
[0020]与现有技术相比,本发明的有益效果是:
[0021]1、本发明所述的升降脚踏,当司乘人员按下控制开关后,电动推杆向前伸出或者回缩,提供推力实现升降运动组件沿导杆向上或向下运动,从而带动踏板组件上升或下降。司乘人员根据实际需求调节好踏板组件位置后,便可松开控制开关,实现踏板组件位置锁定。
[0022]2、本发明所述的电动升降脚踏能够实现不同高度自由调整,满足司乘人员不同的搁脚高度需求,提高司乘人员舒适感。
[0023]3、本发明所述的电动推杆内置的蜗轮蜗杆自锁功能,电动推杆失电后可自动将升降机构锁定,防止脚踏踏板踏板在外力作用下异常动作。
[0024]为了便于本领域技术人员理解,下面结合附图对本发明作进一步的说明。
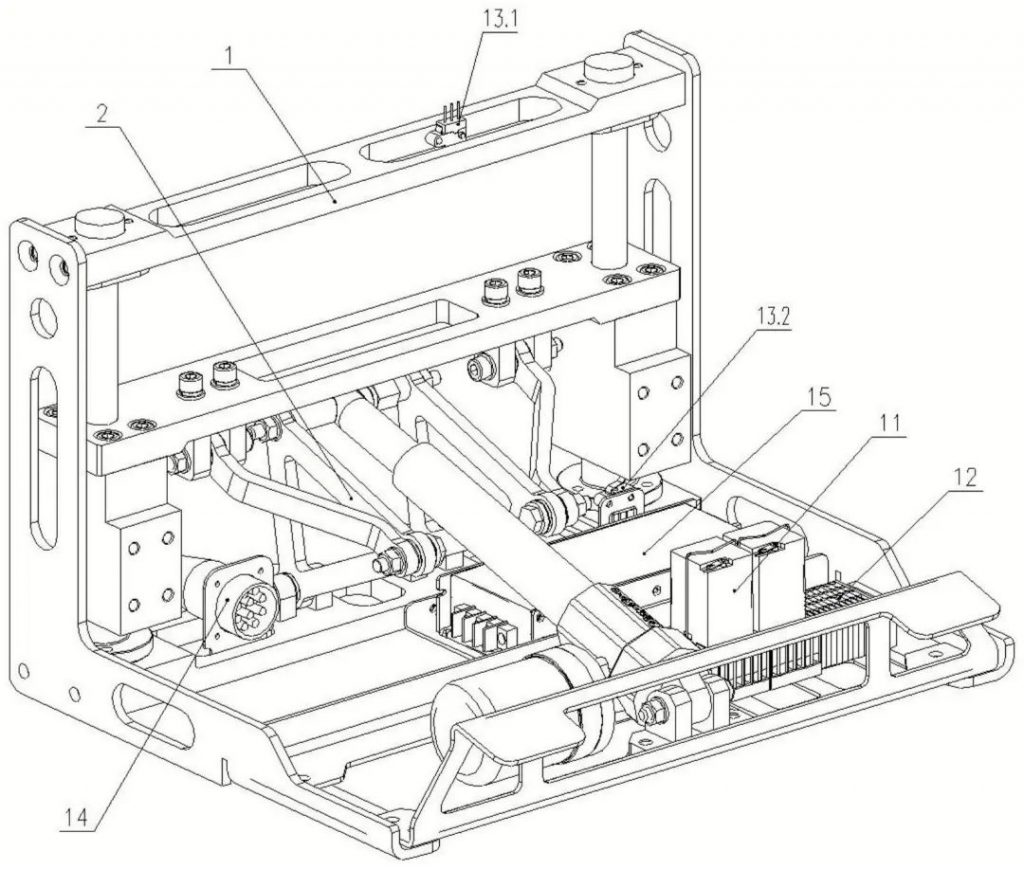
[0025]图1是本发明实施例中升降脚踏内部形态的结构示意图(图中未示出踏板组件);
[0026]图2是本发明实施例中升降脚踏外部形态的结构示意图;
[0027]图3是本发明实施例中脚踏骨架的结构示意图;
[0028]图4是本发明实施例中升降机构的结构示意图;
[0029]图5是本发明实施例中轴承组件以及连接梁的结构示意图;
[0030]图6是本发明实施例中电动推杆、转轴以及摆臂组件的结构示意图;
[0031]图7是本发明实施例中踏板组件的结构示意图;
[0032]图8是本发明实施例中升降脚踏运动至上止点的结构示意图(图中未示出踏板组件);。
[0033]图中:1、脚踏骨架;2、升降机构;3、踏板组件;4、电动推杆;5、轴承组件;6、连接梁;7、转轴;8、摆臂组件;9.1、上升控制开关;9.2、下降控制开关;10、指示灯;11、继电器;12、接线端子;13.1、上止点限位开关;13.2、下止点限位开关;14、电连接器;15、电源转换器;1.1、L型支撑板;1.2、第一撑梁;1.3、第二撑梁;1.4、第三撑梁;1.5、第四撑梁;1.6、导杆;1.7、电动推杆安装座;1.8、下摆臂安装座;
[0034]3.1、脚踏踏板;3.2、连接板;
[0035]5.1、轴承单件;5.2、轴承支座;5.3、上摆臂安装座;
[0036]8.1、下摆臂;8.2、上摆臂。
[0037]为使本发明的目的、技术方案和优点更加清楚明白,下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。在说明书中,相同或相似的附图标号指示相同或相似的部件。下述参照附图对本发明实施方式的说明旨在对本发明的总体发明构思进行解释,而不应当理解为对本发明的一种轨道机车用电动升降脚踏限制。
[0038]另外,在下面的详细描述中,为便于解释,阐述了许多具体的细节以提供对本披露实施例的全面理解。然而明显地,一个或多个实施例在没有这些具体细节的情况下也可以被实施。在其他情况下,公知的结构和装置以图示的方式体现以简化附图。
[0039]根据本发明的一个总体技术构思,参见图1、图2和图3,一种电动升降脚踏,包括脚踏骨架1、升降机构2、踏板组件3、电气部件,脚踏骨架1包括两相对且竖直设置的L型支撑板
1.1、用于连接两L型支撑板1.1的撑梁组件以及导杆1.6,升降机构2包括电动推杆4和升降运动组件,电动推杆4倾斜设置,且一端与撑梁组件连接,而另一端与升降运动组件连接,踏板组件3安装在升降机构2上方。
[0040]本实施例采用电动推杆4作为动力源,通过上升控制开关9.1和下降控制开关9.2可一键启动,操作简单,实现控制踏板组件3的上升或下降,司乘人员将踏板组件3调节到位后,通过电动推杆4内置的蜗轮蜗杆自锁功能将升降机构2锁定。
[0041]参见图3,撑梁组件包括第一撑梁1.2、第二撑梁1.3、第三撑梁1.4和第四撑梁1.5,第一撑梁1.2和第四撑梁1.5分别设置在两个L型支撑板1.1的顶端和末端上,第二撑梁1.3设置在两个L型支撑板1.1的拐点处,第三撑梁1.4设置在第二撑梁1.3和第四撑梁1.5之间,电动推杆4的一端通过设置于第四撑梁1.5上的电动推杆安装座1.7与脚踏骨架1连接。
[0042]导杆1.6的数量为两个且对称竖直设置在第二撑梁1.3上,导杆1.6顶部穿过第一撑梁1.2。第二撑梁1.3还设置有用于连接摆臂组件8的下摆臂安装座1.8。撑梁组件与两L型支撑板1.1通过螺纹连接形成的脚踏骨架1,有效避免了升降脚踏整体倾斜或变形。
[0043]参见图4,升降运动组件包括轴承组件5、连接梁6、转轴7、摆臂组件8,轴承组件5为两组且分别套设在两个导杆1.6上,连接梁6水平设置且两端分别与两组轴承组件5连接,转轴7水平设置且转轴7的中部与电动推杆4伸出端转动连接,摆臂组件8包括两组且对称竖直设置在转轴7的两端,每组摆臂组件8的底部与第二撑梁1.3连接,而顶部与连接梁6连接。
[0044]进一步地,电动推杆4倾斜设置时与水平方向间的夹角约为15°,可有效规避因垂直安装时电动推杆4尺寸过大,导致司机室操作台上下安装空间过小而无法安装问题。
[0045]参见图5,轴承组件5包括轴承单件5.1和轴承支座5.2,轴承支座5.2设置在轴承单件5.1的外部,连接梁6设置有用于连接摆臂组件8的上摆臂安装座5.3。连接梁6通过螺栓与轴承组件5连接,可有效保障两导杆1.6安装后的平行度及垂直度,确保升降运动组件顺利升降。
[0046]参见图6,摆臂组件8包括上下可转动连接的上摆臂8.2和下摆臂8.1,下摆臂8.1为倒置的三角形结构,下摆臂8.1的底角与第二撑梁1.3连接,而靠近轴承组件5的顶角与转轴7连接,远离轴承组件5的顶角与上摆臂8.2连接,上摆臂8.2的顶部与连接梁6连接。
[0047]参见图7,踏板组件3包括脚踏踏板3.1和对称布置在脚踏踏板3.1两端的两个连接板3.2,连接板3.2与轴承组件5连接。
[0048]参见图1和图2,电气部件包括控制开关、指示灯10、继电器11、接线端子12、限位开关、电连接器14等,如有需要,还包括电源转换器15等。控制开关为上升控制开关9.1、下降控制开关9.2两件,分别控制踏板组件3的上升运动和下降运动,限位开关为上止点限位开关13.1、下止点限位开关13.2两件,分别为升降机构2的上止点和下止点提供到位信号。
[0049]本实施例升降脚踏的工作原理如下:
[0050]当司乘人员按下上升控制开关9.1后,电动推杆4得电,伸出端向前推出,提供推力让转轴7及下摆臂8.1绕下摆臂安装座1.8的轴线作旋转运动,上摆臂8.2随之转动,并带动连接梁6、轴承组件5沿导杆1.6向上运动,从而带动踏板组件3上升。司乘人员在任意位置松开上升控制开关9.1后,电动推杆4失电,电动推杆4内置的蜗轮蜗杆自锁功能将升降机构2锁定;或者当踏板组件3上升至上止点后,上止点限位开关13.1动作,使电动推杆4失电并将升降机构2锁定。升降脚踏运行至上止点的位置状态示意可参见图8(图中未示出踏板组件)。
[0051]当司乘人员按下下降控制开关9.2后,电动推杆4得电,伸出端向后回缩,提供拉力让转轴7及下摆臂8.1绕下摆臂安装座1.8的轴线作旋转运动,上摆臂8.2随之转动,并带动连接梁6、轴承组件5沿导杆1.6向下运动,从而带动踏板组件3下降。司乘人员在任意位置松开下降控制开关9.2后,电动推杆4失电,电动推杆4内置的蜗轮蜗杆自锁功能将升降机构2锁定;或者当踏板组件3下降至下止点后,下止点限位开关13.2动作,使电动推杆4失电并将升降机构2锁定。
[0052]以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。

“十五五”开局之年,金龙汽车集团深入开展“深学争优、敢为争先、实干争效”行动,凝心聚力、真抓实干,实现一季度经营业绩稳中有升、质效齐增,营业收入57.61亿元,同比增长17.04%,利润总额1.75亿元,同比增长185.86%,扣非归母净利润同比增长1085.40%。 全力以赴保生产。一季度伊始,年末订单交付的“攻坚战”如期打响,金龙汽车集团的生产车间内,机器轰鸣震耳、人影往来穿梭,一派热火朝天的奋进景象。从物料供应到技术保障,从品质管控到物流发运,该企业牢牢抓住订单冲刺的黄金窗口期,全力保生产、保交付。新春佳节,当国内万家灯火团圆相聚时,该企业许多海外一线工作人员仍坚守在异国他乡的岗位上,全力做好海外订单交付、客户服务及项目衔接工作。 深耕全球拓市场。金龙汽车集团持续稳存量、拓增量,全力跑出市场开拓“加速度”,一季度累计销售各类车辆12184辆,同比增长8.6%。作为中国客车出海“主力军”,该企业一季度出口业绩再创新高,汽车出口9747辆,同比增加37.4%,海外市场占有率稳居行业第一。其中,446辆金龙客车批量装船发往沙特,助力当地公共交通绿色转型;462辆金旅客车顺利发运,正式交付突尼斯公交集团;3000辆苏州金龙高端客车交付阿尔及利亚,总金额...
合作邮箱:chinaiut@sgexpo.cn
新闻热线:021-3114 8748
广告/媒体合作:13916277698
转载内容版权归作者及来源网站所有,本站原创内容转载请注明来源
Copyright © 晟格会展(上海)有限公司 版权所有 Powered by Tp沪ICP备18026942号-6 ![]() 沪公网安备 31011302006543号
沪公网安备 31011302006543号


